 |
LFR |
||||||||
LFR staat voor Line Follower Robot. Het is het ideale robotwagentje om te bouwen als starter. Het wagentje volgt een lijn op de grond. |
||||||||
|
||||||||
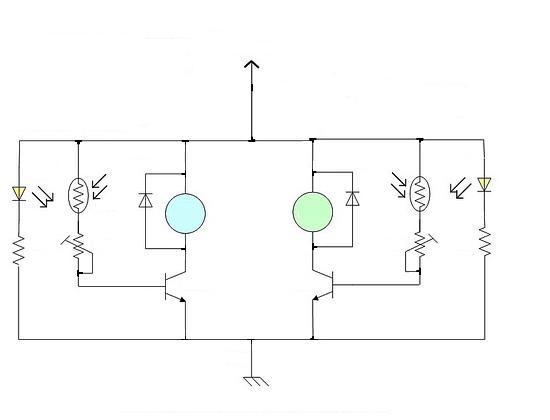
Wanneer de LDR meer licht ontvangt, weerkaatsing van de grond of beter van een al dan niet zwarte streep, van de led zal er meer basisstroom door de desbetreffende transistor gaan. De transistor staat in actieve (dus lineaire) mode zodat collectorstroom evenredig is met basistroom. Er zal dan meer of minder stroom door het dcmotortje gaan. Pas bovenstaande uitleg toe op beide motoren. De ene motor draait dan bijvoorbeeld trager dan de andere. het wagentje zal draaien... |
||||||||
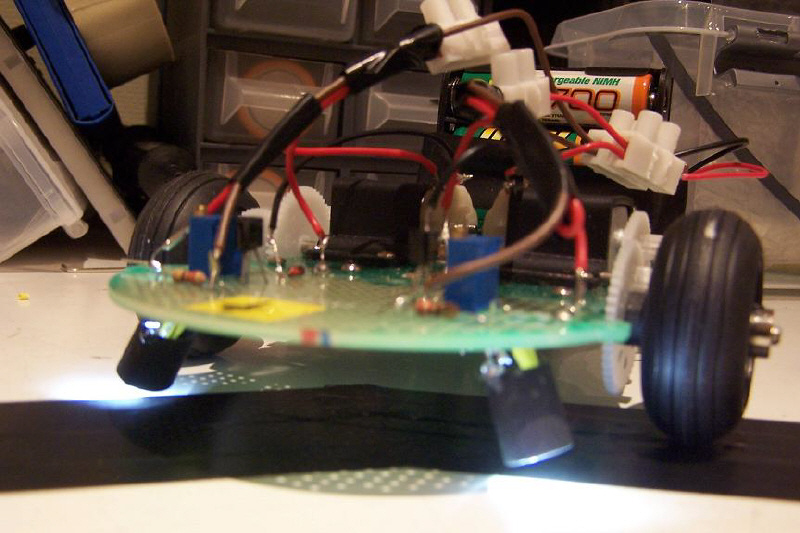
Het basisrobotplatform ( 2dc motortjes van 3V, asjes, tandwieltjes,...) heb ik van Conrad gehaald. (Bestnr.: 191491 - 89) |
||||||||
De led en de LDR heb ik in een gezamelijk buisje (krimpkous) gestoken. zodat licht afkomstig van de omgeving weinig van invloed kan zijn. Tevens wordt licht, al dan niet gereflecteerd via de grond, beter opgevangen door de LDR. |
|
|||||||
...en dan na relatief lang zitten afregelen aan de potmeters, herpositoneren van leds en LDR's begon het wagentje eindelijk zijn zwarte lijn te volgen... In de toekomst zou ik wel opteren voor nog iets krachtiger motoren die trager draaien. De snelheid van het wagentje is soms te groot waardoor hij van zijn lijn afraakt omdat sensoren en electronica te traag reageren. Spanning wegnemen van de motoren door aan de potmeters te draaien is geen optie want dan dreigt hij stil te vallen omdat motoren niet krachtig genoeg zijn. Kortom dit robotplatform was niet de beste keuze. |
|
|||||||
materiaallijst |
||||||||